
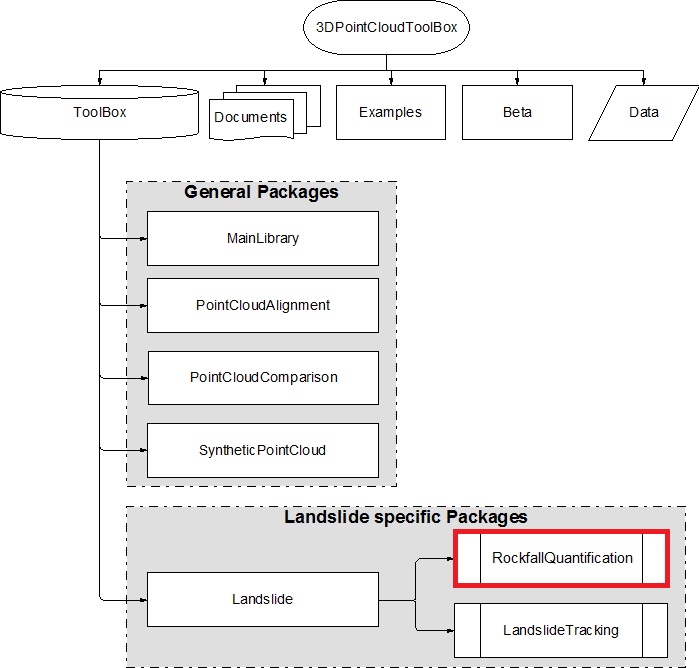
3DPointCloudToolBox contains general packages with state-of-the-art algorithms and dedicated functions for point cloud preprocessing, including the alignment of point clouds PointCloudAlignment and PointCloudComparison for point cloud comparison (point-to-point and point-to-surface). This library uses object-oriented programming under the MATLAB® environment, which enables the management of large datasets. The elementary brick is the object class PointCloud created with a series of properties useful for data treatment, which includes the point’s position (X; Y; Z), intensities (I), colors (R; G; B), normal vectors (Nx; Ny; Nz), etc. Other included properties are related to the spatial distribution of the points, such as Delaunay triangulation or voxel structure, Kd-tree. The 3DPointCloudToolBox contains specific postprocessing packages oriented toward rockfall (RockfallQuantification) or landslide (LandslideTracking under development) analysis.
Disclaimer
3DPointCloudToolBox is a freeware developped at the Group Risk at the University of Lausanne. No warranty is made for the functioning of the software and no responsibility is assumed by in the use of this tool.
Support
There is no formal ongoing support for this freely distributed public software. However, if you have any questions or suggestions, please contact dario.carrea@unil.ch
Publication
Here you can find more information of the methods use in the 3DPointCloudToolBox:
Download